AGV常规操作:
(1) 当使用 1 个新的节点时,应在触摸屏上先“清空”,以确保无其他数据。
(2) 卡片的逻辑方向有“往返”之分,一般使用“往”。逻辑“返”用于在同一条线路上反复经过同一张节点卡时,实现“往返”不同的功能动作的目的。
更多AGV常规操作:l33 l695 03l0 杨冬辉
(3) “往”“返”由卡片的“逻辑换向”来切换,逻辑的“往”“返”方向与车体的实际运行方向没有关系。
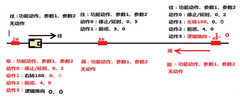
(4) 举例说明:
1) 沿途有 3 张卡,节点 2#在左端,3#中间,4#在右端;
2) 需要 AGV 在 2#和 4#之间自动“往返”运行,并且速度设为 4 档;
3) “往”时 3#号节点停 5 秒后以 3 档速度自动启动前巡;
4) “返”时 3#号节点忽略即不做动作
更多AGV常规操作:l33 l695 03l0 杨冬辉



